Leonardo è il robot che cammina, corre e vola, per esplorare terreni sconnessi
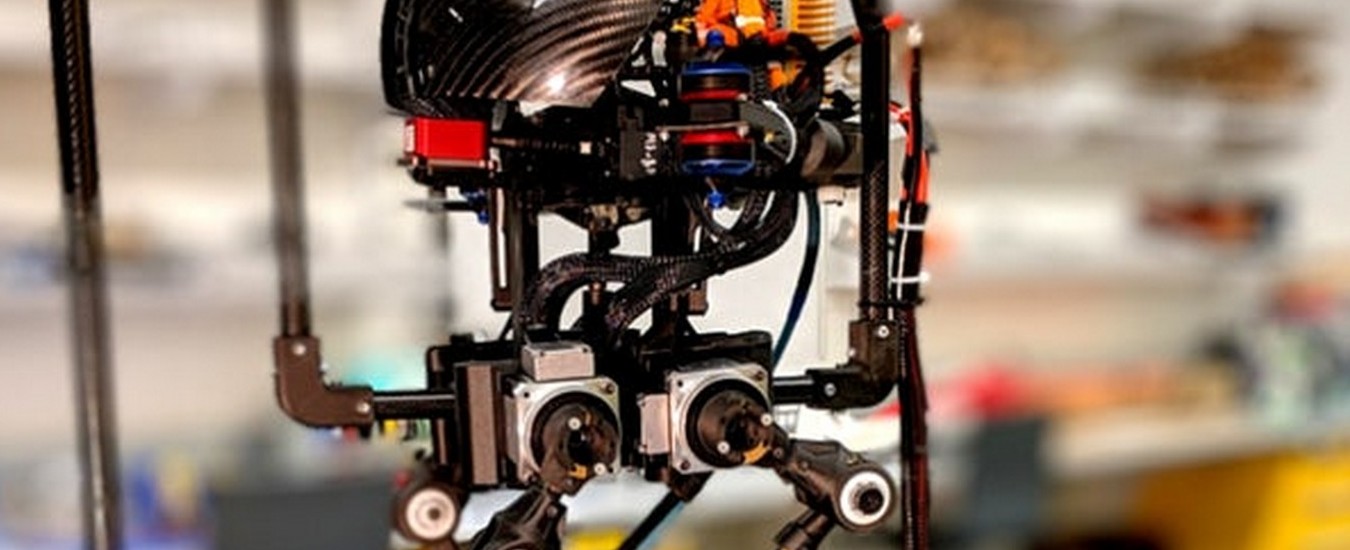
Esistono robot che camminano e corrono, esistono robot che volano. Finora però non esisteva un robot capace sia di correre che di volare. L’ha progettato un ricercatore della Northestern University di Boston e del California Institute of Technology. Il nome Leonardo si deve all’acronimo LEg ON Aerial Robotic DrOne. È alto circa 76 centimetri e si regge su due gambe sottili e flessibili. Il suo corpo è realizzato per lo più in fibra di carbonio, il che lo rende resistente, ma allo stesso tempo leggero: pesa solo 2,7 chilogrammi.
Ai lati del busto ci sono propulsori capaci di generare una spinta in entrambe le direzioni. È questo l’elemento innovativo di Leonardo. Prima che vi facciate un’idea sbagliata, è bene precisare che il volo non è la funzione a cui è destinato questo robot. Lo spiega Alireza Ramezani, l’assistente professore di ingegneria elettrica e informatica che ha sviluppato Leonardo nella sua ricerca post dottorato: “è stato creato per fini esplorativi, ossia per combinare la mobilità con le gambe e la mobilità aerea, così da compiere esplorazioni autonome”. L’idea, insomma, era di dotarlo “sia di gambe sia di propulsori per migliorare la sua capacità di salto“.

Lo scenario fantascientifico tratteggiato nell’articolo sul sito della Northestern University è quello di un robot che cammina sulla superficie di un pianeta lontano. Arriva nei pressi di una collina scoscesa, flette le ginocchia e salta grazie ai propulsori, per poi atterrare al sicuro oltre l’ostacolo. Senza chiamare in causa uno scenario tanto estremo, si potrebbe immaginare Leonardo impegnato nell’esplorazione autonoma di aree disastrate come quelle interessate da catastrofi naturali. Le possibili applicazioni di questa idea sono molteplici, tutte riconducibili al fatto che Ramezani è riuscito a risolvere in modo efficiente un problema comune a molti robot: la stabilità sulle gambe. “La sfida principale per i robot con le gambe, e anche per gli umani, è che si può stabilizzare il corpo, ma a volte si cade”, ha detto Ramezani.
Anche perché è raro che un robot cammini su un terreno perfettamente livellato. È più probabile che si debba muovere su terreni accidentati, dove l’equilibrio fa la differenza fra cadere e restare in piedi. Ramezani racconta che quando ha iniziato a studiare sistemi robotici su gambe, quello che tutti si chiedevano nella sua facoltà era se ci fosse un modo per realizzare un airbag capace di attutire le cadute del robot. Lui ha aggirato il problema, facendo “un robot che non cade”.
Questa non è l’unica chicca che ha raccontato Ramezani. Ha svelato anche che l’idea di progettare Leonardo, così com’è, gli è venuta osservando gli uccelli. Perché? Perché quando noi umani progettiamo robot ci concentriamo su un unico tipo di locomozione. Gli uccelli invece camminano, volano e corrono. Da qui ha tratto un grande insegnamento: “puoi vedere l’ingegneria alla perfezione nella natura“. Dalla natura possiamo imparare molto, tanto che è stata per lui “un’ispirazione in quasi tutti i progetti”. Per la cronaca, il ricercatore ha costruito anche un robot volante prendendo spunto dalle acrobazie aeree dei pipistrelli.
A proposito di pipistrelli. Alcuni anni fa un gruppo di lavoro dell’Ecole polytechnique fédérale de Lausanne (EPFL) ha costruito un robot simile a un pipistrello, capace anche di spostarsi sulla terraferma. Tecnicamente però era un drone, che in caso di necessità poteva anche strisciare a terra. In sostanza l’opposto di Leonardo.