Progetto Hercules, la guida autonoma “Made in Italy” sfida la Silicon Valley

Fra i molti progetti promossi dall’Unione Europea nell’ambito del programma Horizon 2020 c’è Hercules, (acronimo di High-Performance Real-time Architectures for Low-Power Embedded Systems), mirato alla realizzazione di un sistema che fra le cose consentirebbe una guida autonoma a basso consumo energetico, efficiente e dalle apparecchiature poche ingombranti. L’Italia ha un ruolo fondamentale all’interno di Hercules, grazie alla partecipazione dell’Università degli Studi di Modena e Reggio Emilia (UNIMORE), l’Evidence Srl di S.Giuliano Terme (PI), pi.tom di Navacchio (PI) e Magneti Marelli.
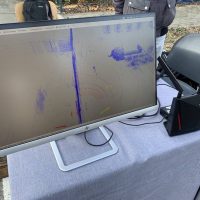
Qualche giorno fa siamo saliti a bordo di un prototipo di auto che si è mosso su un percorso prestabilito e abbiamo potuto vedere all’opera le soluzioni hardware e software implementate. L’auto era una berlina sportiva allestita per l’occasione e il perimetro del percorso che ha seguito era stato “registrato” con un Lidar (3D laser scanning). I ricercatori hanno stabilito punto di partenza e punto di arrivo, e si poteva seguire i movimenti dell’auto dal monitor, in cui erano evidenziati linee verdi e rosse: le prime per gli elementi statici, le seconde per quelli in movimento, come le persone o altri mezzi.
Per la partenza è stato sufficiente avviare l’auto e schiacciare i pulsanti della guida autonoma sul volante. Il prototipo si è mosso tracciando traiettorie in autonomia e frenando in caso di ostacoli. L’auto è risultata un po’ goffa nelle partenze da ferma, anche perché non aveva mai la possibilità di procedere alla velocità di crociera che le è congeniale, ma quel che conta è stato vedere mulinare il volante in scioltezza fra le curve.
Il Lidar era stato montato sul tettuccio. Si trattava di un modello a 32 livelli di scansione con un angolo di copertura compreso tra -25 e 10 gradi e un raggio d’azione di 200 metri. Una configurazione adeguata per uno scenario a bassa velocità. Diversa sarebbe stata la situazione in un circuito o ipoteticamente su una strada ad alto scorrimento, dove sarebbe stato attivato anche il radar frontale con copertura di 800. C’erano poi due telecamere per la ripresa esterna, fondamentali per completare la sperimentazione.

Il grosso del lavoro è stato svolto dalla componente informatica, basata un’architettura multi-core (a più core) programmata per processare le informazioni provenienti da Lidar, telecamere e altri sensori, in tempo reale. Il software è in grado di comprendere quali informazioni sono prioritarie: per esempio, è più importante l’algoritmo che segnala la presenza di un pedone rispetto a quello che gestisce il sistema audio.
Il ricercatore Marco Solieri di UNIMORE ha spiegato che il segreto per il buon funzionamento di Hercules è il suo software. “Possiamo identificare tre livelli. Quello centrale rappresentato da Erika, il sistema operativo in tempo reale che stabilisce priorità e scadenze. Su tutto questo, un software di compilazione che aiuta il programmatore, e sotto la gestione effettuata dell’hypervisor, il sistema operativo dei sistemi operativi”. La sinergia di questi tre elementi organizza ed esegue l’azione strategica di processing secondo il principio di priorità e partizionamento delle risorse. In linea di massima, le richieste ad alta criticità sono servite più spesso e usano risorse non condivise con quelle a bassa priorità.

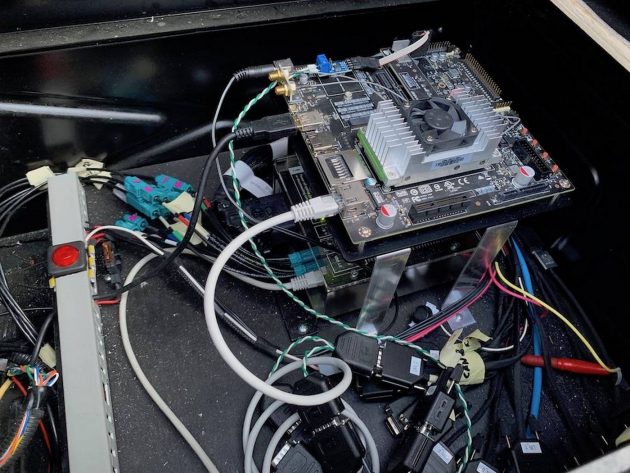















L’altra novità sta nell’ingombro estremamente ridotto di tutto l’hardware che occorre per far “guidare” un’auto in maniera autonoma. Spesso può occupare l’intero bagagliaio. Il prototipo impiegato dal team di UNIMORE sfrutta la piccola piattaforma Nvidia Jetson TX2 e due comuni batterie: una alimenta l’unità principale, l’altra il LIDAR (Laser Imaging Detection and Ranging).
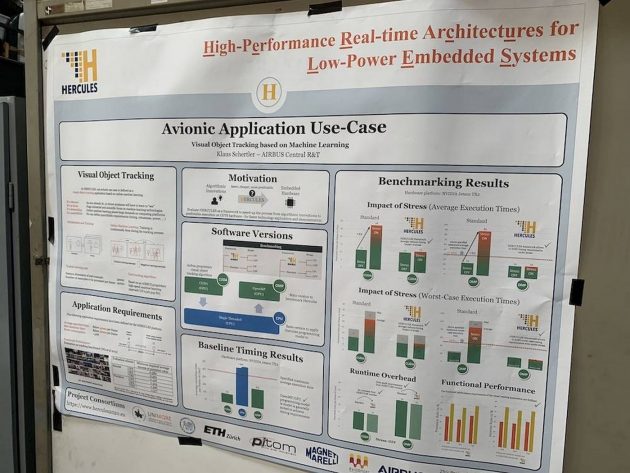
Abbiamo specificato all’inizio che sono coinvolte anche aziende quali per esempio Magneti Marelli. Le realtà industriali sono molte di più e il motivo è che le applicazioni sul campo di Hercules possono andare ben oltre le auto a guida autonoma. Airbus ha pensato ad esempio alla possibilità che un velivolo possa “imparare” a riconoscere elementi ambientali, quindi tracciarli.
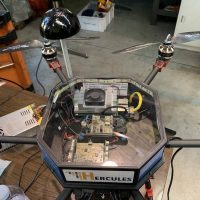
La startup Lifetouch ha integrato le peculiarità di Hercules in un robottino elettrico su 6 ruote capace di fare consegne in ambito metropolitano. Pi.Tom sta lavorando a un drone dotato di videocamera e GPS capace di effettuare il tracciamento in tempo reale di un oggetto in movimento. Ad esempio, consentire l’inseguimento visivo e fisico di un’auto che corre sulla strada.
Da sottolineare infine che gran parte delle tecnologie prodotte è rilasciata in forma open source, quindi chiunque le potrebbe sfruttare per creare nuovi prodotti. Un successo italiano e una celebrazione della ricerca in ambito europeo.