TransAID, l’Europa per la sicurezza del traffico di auto tradizionali, connesse e a guida autonoma
I veicoli a guida autonoma diventeranno una realtà sulle nostre strade, ma la loro integrazione sicura in un sistema di trasporto "misto" richiederà particolari attenzioni. Il progetto TransAID finanziato dall'UE sta affrontando le sfide poste da condizioni di traffico specifiche, e testando possibili soluzioni.
L’arrivo in circolazione di veicoli a guida autonoma, insieme a quelli convenzionali, potrebbe causare problemi. Per prevenirli e risolverli la Commissione Europea ha finanziato il progetto TransAID, finalizzato all’ottimizzazione delle infrastrutture esistenti e a garantire sicurezza e comfort a tutti gli utenti della strada.
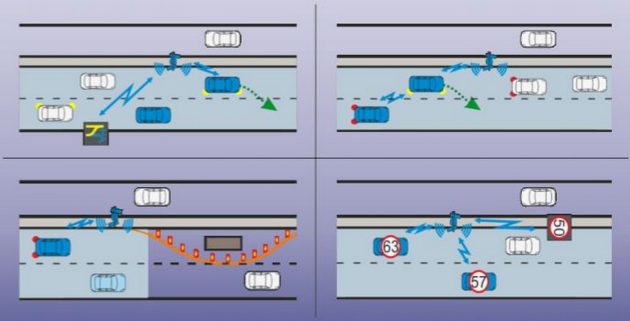
Per capire di cosa si parla, bisogna fare un salto avanti nel tempo fino al momento in cui ai veicoli tradizionali si affiancheranno in strada quelli a guida autonoma (AV, Automatic Vehicle) e quelli a guida autonoma connessi (CAV). Questi ultimi sono i mezzi di trasporto che comunicano con le infrastrutture (ad esempio semafori, attraversamenti pedonali, eccetera) per capire come muoversi. Per ovvi motivi ci saranno zone in cui sarà possibile garantire un’automazione elevata, altre in cui non sarà possibile a causa di sensori mancanti, complessità elevata del traffico e altro.


I ricercatori coinvolti nel progetto TransAID hanno il compito di sviluppare e dimostrare l’attendibilità di procedure e protocolli di gestione del traffico per consentire una coesistenza armoniosa di veicoli automatici, connessi e convenzionali, implementando infrastrutture e soluzioni per la gestione centralizzata del traffico.
La questione non è banale, perché come spiega il coordinatore del progetto Julian Schindler del German Aerospace Center (DLR), in situazioni di emergenza, incroci particolarmente complessi o in mancanza di sensori, i veicoli autonomi dovrebbero restituire il controllo al conducente o a un operatore remoto. Se, per qualche ragione, questo passaggio non avvenisse in modo fluido, il veicolo potrebbe fermarsi per garantire la sicurezza, creando ingorghi di traffico. “Il nostro obiettivo è esaminare quali possono essere gli effetti sull’efficienza del sistema di trasporto, nonché sulla sicurezza e il comfort degli altri utenti della strada, e trovare soluzioni per anticipare gli scenari problematici”, conclude.
Innanzitutto, verranno eseguite simulazioni per trovare soluzioni ottimali di gestione assistita dall’infrastruttura per controllare i veicoli connessi, quelli automatici e convenzionali nelle aree di transizione, tenendo conto dell’efficienza richiesta e delle misure di sicurezza del traffico. Quindi, verranno sviluppati protocolli di comunicazione per la cooperazione tra veicoli collegati / automatizzati e l’infrastruttura stradale. Verranno inoltre prese in considerazione misure per rilevare e informare i veicoli convenzionali.

Le soluzioni più promettenti saranno implementate come prototipi del mondo reale e dimostrate in condizioni urbane reali nei Paesi Bassi. Infine, saranno formulate le linee guida per una guida avanzata basata sull’infrastruttura. Le linee guida includeranno anche una tabella di marcia che definisce le attività e i necessari aggiornamenti delle infrastrutture stradali nei prossimi 15 anni al fine di garantire una coesistenza regolare tra veicoli convenzionali, connessi e automatizzati.
TransAID è uno dei primi progetti in tutto il mondo a occuparsi di questo argomento. Schindler spiega che “è importante discutere anche degli impatti negativi della guida autonoma (AD) per consentire a tutti di trarre vantaggio dalla maggiore mobilità offerta dai sistemi automatizzati”. Per questo motivo i ricercatori porteranno avanti simulazioni realistiche del traffico futuro, lavoreranno in stretta collaborazione con le organizzazioni europee e internazionali di standardizzazione, come l’Istituto Europeo delle norme di telecomunicazione, per definire standard comuni e univoci. Inoltre svilupperanno e testeranno componenti dell’infrastruttura di concerto con i produttori di sensori e apparecchiature per testare i prototipi.